








总装图
齿轮1
传动装配图
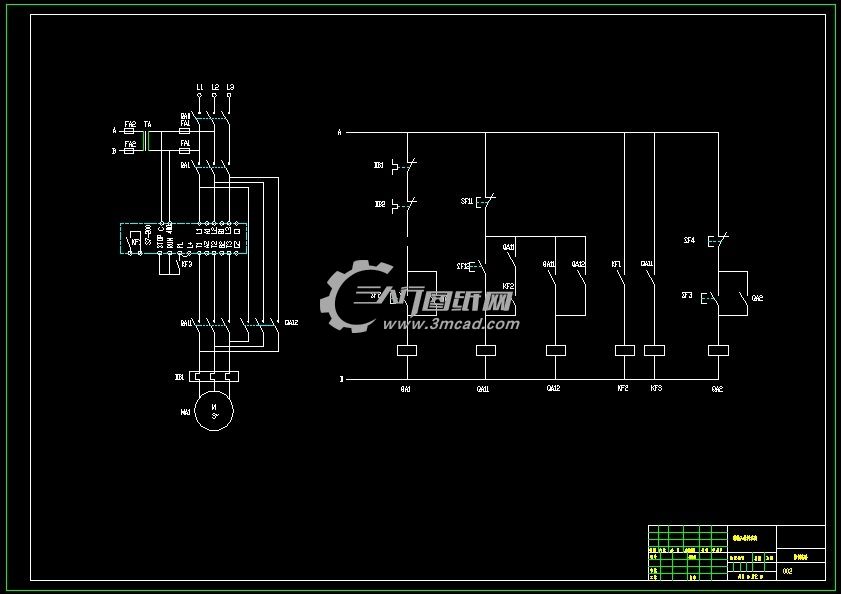
控制电路
目录
气体分配盘
气体分配器
气压控制图
图纸合集
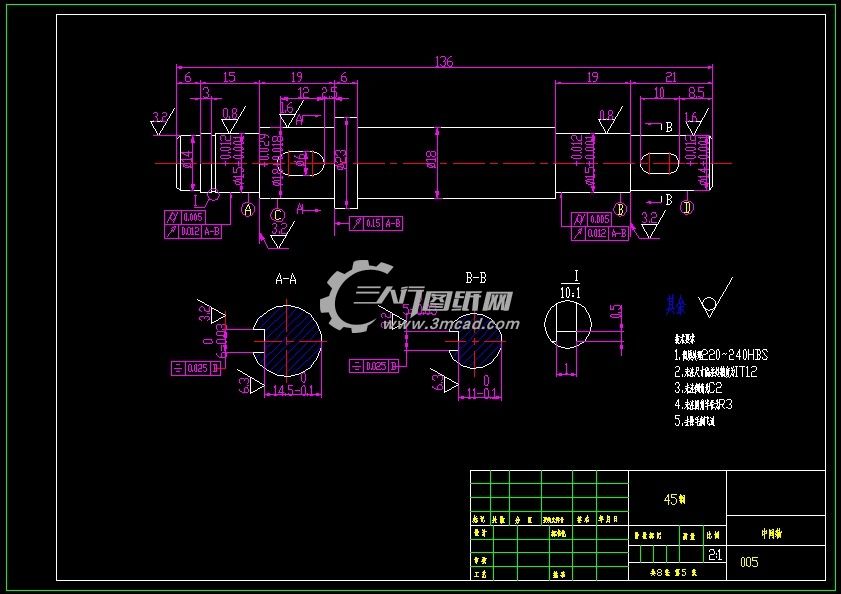
中间轴
字数统计
| ID | 文件名称 | 文件格式 | 文件大小 |
|---|
文件大小:7.98 MB(格式:.zip)
履带式吸附爬壁机器人设计 壁式清洗清洁机器人机械手(含CAD图纸)-工业机器人在各个领域得到了广泛地运用。其中,爬壁机器人以其在核工业、建筑、消防等行业的突出优点越来越受到人们的关注。 本文在详述国内外爬壁机器人研究现状的基础上,对各种现有爬壁机器人结构原理进行了分析、对比与评价,对履带吸盘式爬壁机器人的结构原理进行了深入地研究与开发,并对一些关键部分进行了设计计算。 本课题研究的履带吸盘式爬壁机器人采用履带式移动方式,双履带和车体构成机器人的基本框架;真空吸盘式吸附方式加以完善的配气系统,可为机器人提供足够的吸附力。在地面操作人员的遥控下,爬壁机器人能够在玻璃等特定壁面上完成清洁壁面、传递救援物资等任务。 履带吸盘式结构是现有爬壁机器人结构样式的优化组合,它克服了现有爬壁机器人结构上的缺点与不足,提高了爬壁机器人的实用性能;因此本课题的研究具有较高的科研价值和经济价值。申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:














