文件大小:11.67 MB(格式:.zip)
摘要
在市政工程中,有大量的安装及维修等工作需要爬杆作业。对于较粗的杆件,人工攀爬和工程车作业都比较方便,但是对于一些直径较细,强度较小的杆件比如路灯杆等,人工攀爬较为困难。因此本文设计了一爬杆机器人,可以在没有障碍的光杆上爬行,对人工攀爬较难的作业具有较大的现实意义。
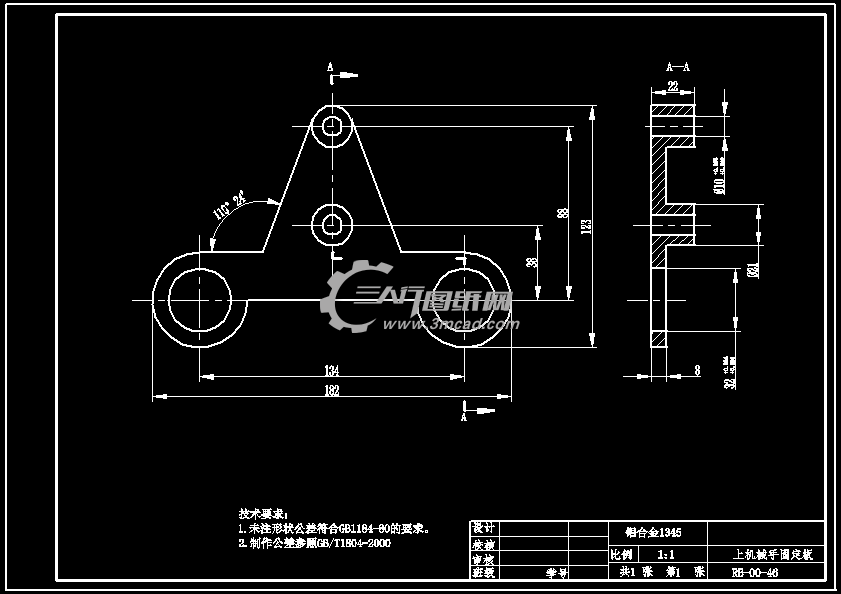
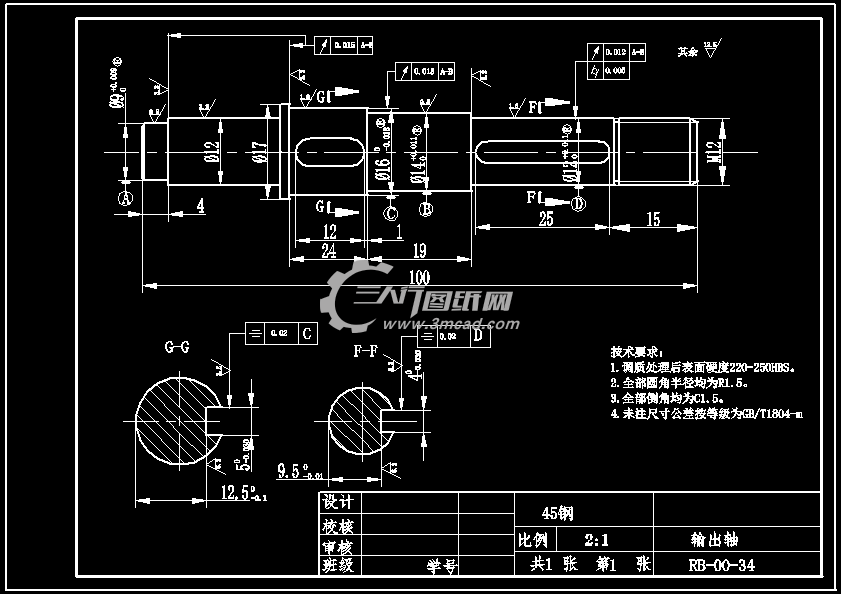
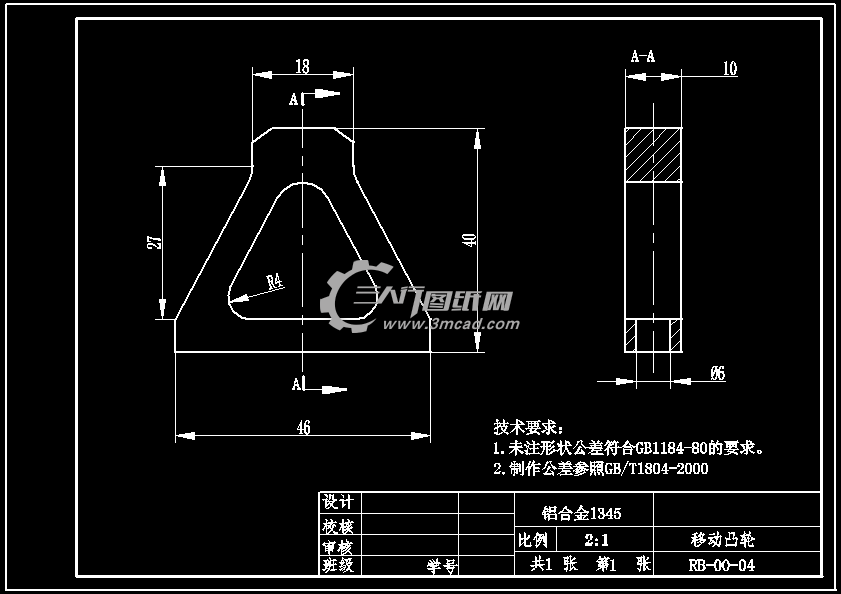
本文设计的爬杆机器人由曲柄滑块机构、并联盘形凸轮机构、移动凸轮机构以及上下机械手爪等组成,通过弹簧的预紧力来实现机器人手爪对杆的抱紧,通过曲柄滑块机构、凸轮机构等实现攀爬动作,同时机器人只需一个驱动源就能带动整个机器人的运动,能攀爬变直径的杆,工作简单可靠,运动灵活,可以广泛应用于各种高空作业。
关键字:爬杆机器人,变直径杆,夹紧,攀爬
目录
1绪论 1
1.1研究目的 1
1.2国内外研究现状 1
1.3研究内容 3
1.4设计要求 4
2爬杆作业机器人总体方案设计 5
2.1机械方案设计 5
2.2电气控制系统设计 7
2.3小结 8
3机械系统设计 9
3.1减速机构设计 9
3.2曲柄滑块机构设计 17
3.3凸轮机构的设计 23
3.4机械手爪设计 24
3.5电动机选择 26
4电气控制 28
4.1系统论述 28
4.2直流电机单元电路设计与分析 29
4.3直流电机PWM控制系统的实现 36
5结论与展望 43
参考文献 44
致谢 45
包含以下文件: